Instabil lágy szerkezetek és lágy robotok mechanikai modellezése | Mechanical modelling of unstable soft structures and soft robots
Témavezető
Dr. Berezvai Szabolcs
Email
szabolcs.berezvai@gmail.com
Típus
BSc MSc TDK
Nyelv
magyar angol
Bevezető:
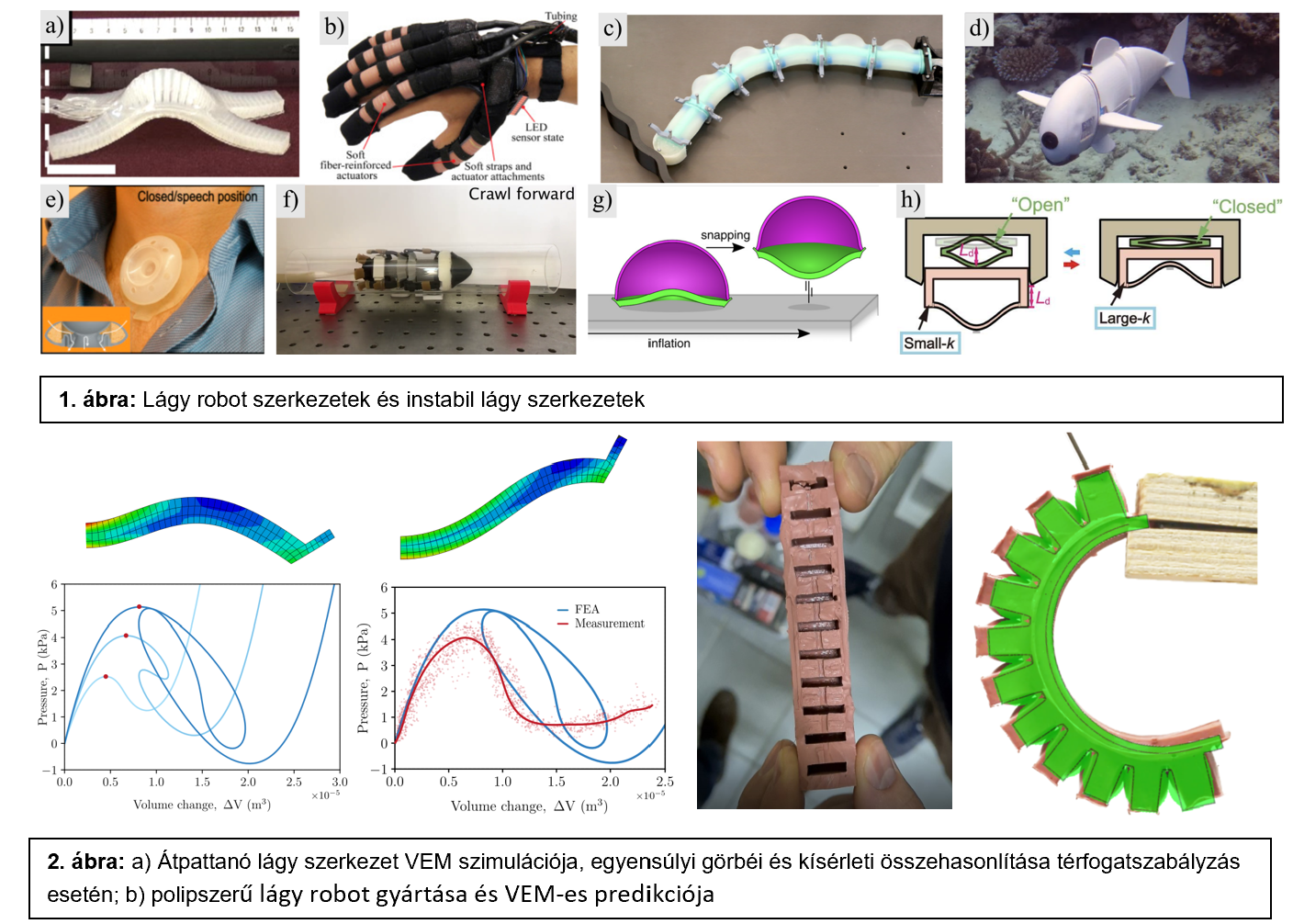
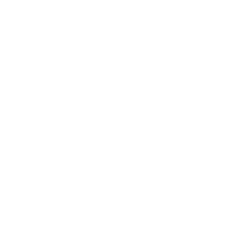
Az anyagi és szerkezeti nemlinearitást és instabilitást számos lágyrobotikai alkalmazás során használják a kívánt, adaptív funkciók biztosítása érdekében. Ezek az instabilitások a lágy szerkezetet növekvő terhelése során jelentketik (nagy elmozdulások és nagy alakváltozások esetén), és a terhelés/alakváltozás kritikus szintjének túllépésekor hirtelen, ugráasszerű változás következik be az eszköz alakjában és konfigurációjában. Az ilyen szerkezeti instabilitásokat általában a szerkezet monostabil vagy bistabil egyensúlyi állapotának snap-through és snap-back viselkedésének is nevezik. Ez gyors és dinamikus mozgást biztosít, ami lehetővé teszi a lágy robotok számára, hogy olyan feladatokat hajtsanak végre, mint a megfogás, a helyváltoztatás vagy más, a környezettel való rendkívül hatékony interakció.A téma egy 2025-ben indult STARTING kutatási pályázat részét jelenti. A téma folytatható MSc vagy PhD szinten is.
Feladatok:
A feladat során a lágy robotában használt különböző szerkezetek, robotok vizsgálatát, végeselemes szimulációját lehet vizsgálni. A lágy szerkezetek a jelentkezővel közösen alakítjuk ki a pontos témakiírást, amely magába foglalhatja az alábbi feladattípusok közül akár többet is:- analitikus, szemi-analitikus módszerek a szerkezeti instabilitás modellezésére
- lágy szerkezetek, robotok végeselemes analízise (fluid-structure interakciók modellezése)
- lágy szerkezetek érzékenységvizsgálata, bizonytalanságainak modellezése predikciója
- numerikus/analitikus paramétervizsgálat (anyagi, geometriai, stb..) a szerkezet optimalizációja
- szerkezeti és anyagi bizonytalanságok karakterizációja, modellezése és predikciója
- adatalapú módszerek alkalmazása és implementálása a lágy szerkezetek modellezésére
- kísérleti berendezése tervezése, építése, lágy robotok létrehozása, teszelése mérése
- lágy robotok szabályozása (szabályzó építése, algoritmusok teszelése), lágy robotok mérési feladatai
- stb….