Zsonglőrködő robot szabályozása
Témavezető
Bodor Bálint
Email
bodor@mm.bme.hu
Típus
BSc MSc TDK
Nyelv
magyar
Bevezető:
A zsonglőrködés igen hosszú történetre tekint vissza, már az ókori kultúrákból is vannak emlékek ezzel kapcsolatban. Rendkívül sok fajta eszközzel lehet zsonglőrködni, de ezek közül a legismertebb talán a labdákkal való zsonglőrködés.A robotok igen sokrétűen alkalmazhatóak, így nem csoda, hogy ma már találhatunk zsonglőrködő robotokra is példát ( videó: https://www.youtube.com/watch?v=9asDO_1A27U ). Ahhoz, hogy egy robot megfelelően dobja el az esetlegesen ismeretlen tömegű labdákat is, szükséges egy szabályozó algoritmust megalkotni, amellyel a robot a labdát egy előre megadott pályagörbén gyorsíthatja fel, ami után elengedve a labdát eldobja azt.
Feladatok:
-Egy zsonglőrködésre alkalmasnak tartott robot mechanikai modelljének megalkotása-Szabályozási algoritmusok megismerése
-Szimulációk készítése (pl. MATLAB környezetben)
-(opcionális: tanuljunk meg zsonglőrködni legalább 3 labdával…)
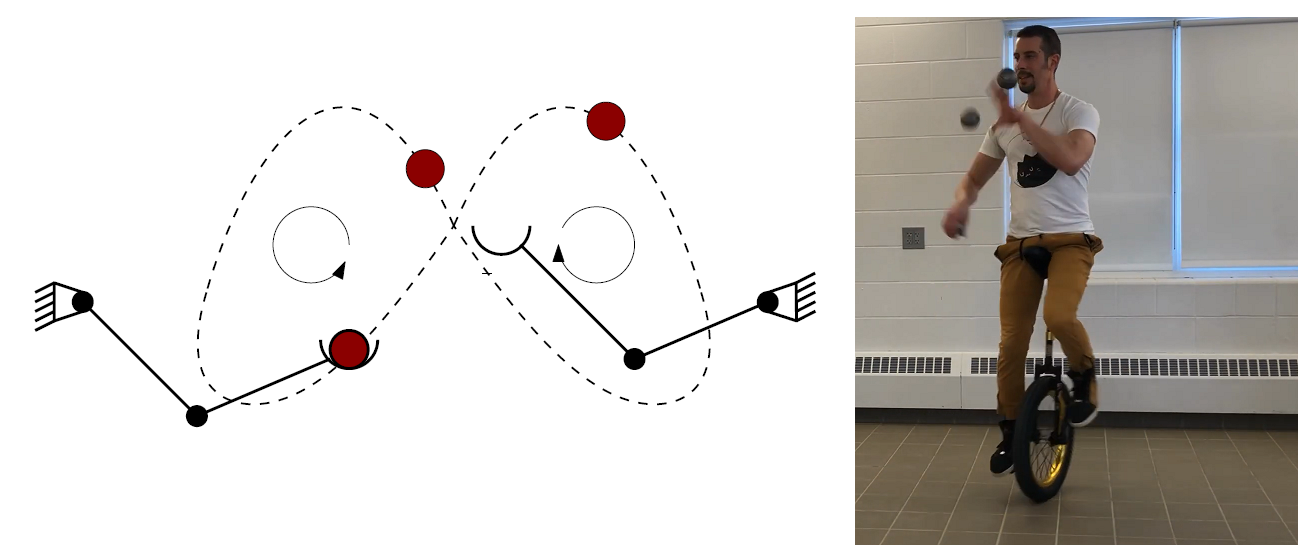
Balra: Egy lehetséges mechanikai modell; Jobbra: egy ügyes bácsi (szakirodalom: https://www.youtube.com/watch?v=yXb2llnJu2Y)